Deep sea
The successful implementation of ARCHES culminates in the establishment of a heterogeneous, autonomously interacting robotic network for underwater use. The applicability is to be tested during a demo mission at the end of 2020. It will be demonstrated that the different measurement platforms can communicate with each other and that the measuring network reacts autonomously to environmental changes. It changes its measuring strategy according to a specified protocol. As a science case, the demo mission addresses the increasing loss of oxygen in coastal waters, whereby mechanisms for the ventilation of coastal waters are to be investigated.
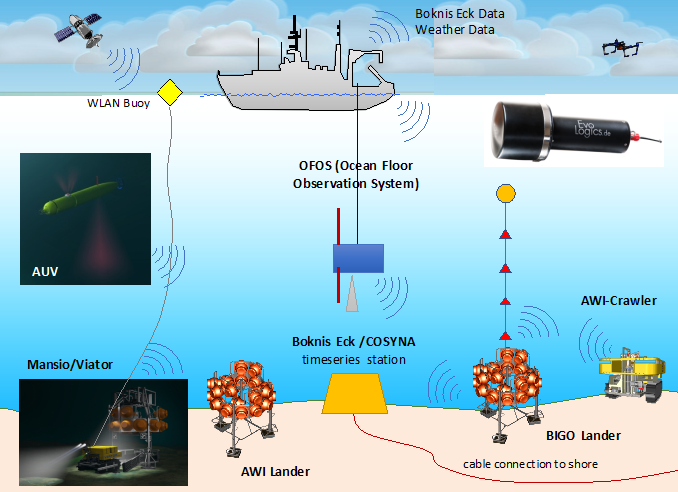
The network consists of three stationary lander systems (BIGO, MANSIO, AWI Lander) and four mobile measurement platforms consisting of crawlers from AWI and GEOMAR, an autonomous underwater vehicle (AUV Paul) and the towed camera and sensor system OFOS. There is also a towed WiFi buoy and a multicopter.
The multicopter serves as communication interface between the large-scale operating AUV and the measurement network, which is limited to a few 100 meters. In addition to imaging methods and physico-chemical parameters (e.g. flow, salinity, topography of the seabed), the platforms are to measure essentially oxygen in the water column as well in the seabed. This data is transmitted to the master platform by means of acoustic modems (Evologics) and evaluated using external data (weather, existing time series data from Boknis-Eck). In order to enable the network to react independently to anomalies in the oxygen content, techniques of conventional time series analysis and machine learning for predicting oxygen fluctuations are to be used in addition to threshold values.
The 12-day demo mission will take place in the Eckernförde Bay (west Baltic Sea) near the time series station Boknis-Eck while taking the FS Alkor (AL547, October 20 - October 31, 2020) /) carried out.