Demo mission Space in the ARCHES Project

























Finally, we are now approaching the end of the long project , the ARCHES demo mission already planned for 2020 now takes place from 13.6.-9.7.2022 in Catania / Etna Italy.
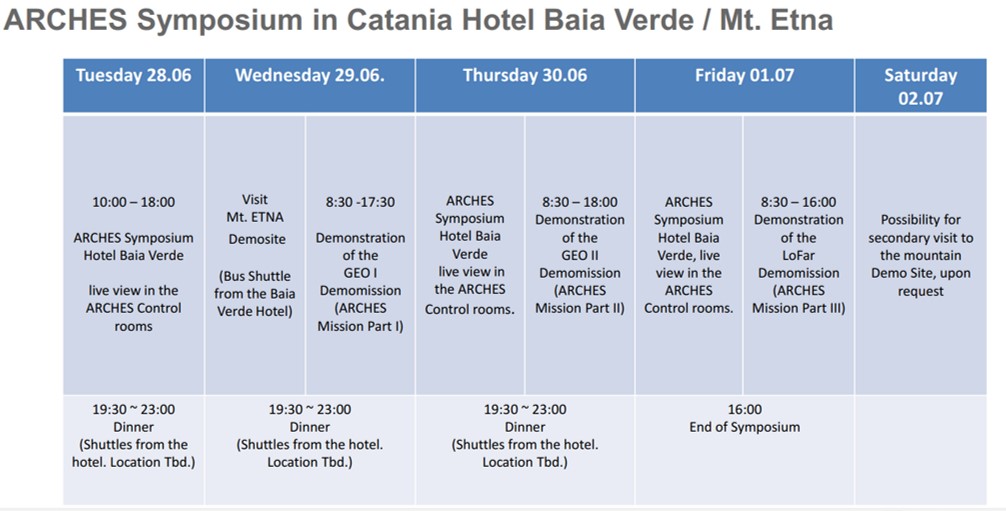
Also a symposium occures from 28.06. to 01.07., in Catania and as an online event. Furthermore, an ARCHES Summer School was organised by our partner JUB on the island of Vulcano from 13.6 - 21.6. We connect local visitors and researchers with online participants at all these events via a hybrid lecture system. Therefore, many prominent visitors from the space and robotics industries attend our physical and digital platforms. Interesting lectures and talks are offered, and of course live links to the experiments on Etna. There was also a daily lecture from the Summerschool (14.6-20.6 - 13:00 - 14:00).
Besides the partners AWI and Geomar that held the demomission deepsea in 2020, DLR and KIT with ESA as associated partner are doing the space demo mission.
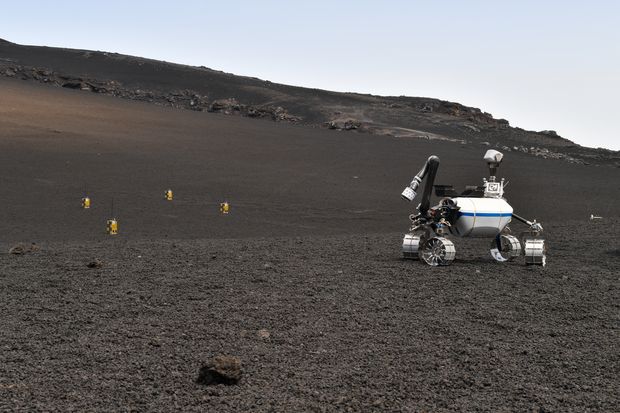
The analogue mission shown at the Space-Demomission consists of three individual parts, which scientifically focus on geological research and radio astronomy, the relevant scenarios for future exploration activities.
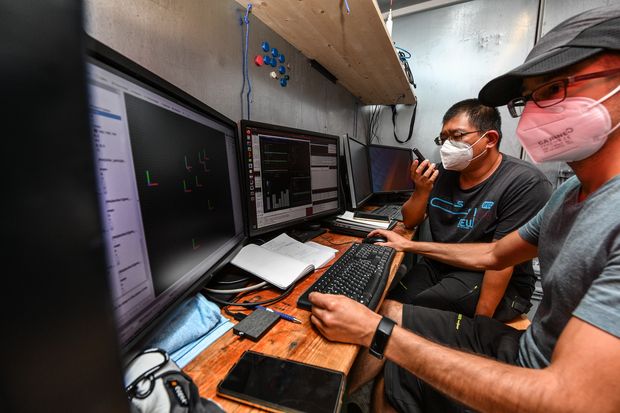
The first two scenarios examine technical and operational aspects of in situ geological analysis and sample return. The first scenario (GEO I) focuses on a cooperative heterogeneous team of two wheeled systems (LRU1 and LRU2) and a flying drone (ARDEA) exploring fully autonomously sites of interest and performing scientifically triggered remote spectral imaging, LIBS spectroscopy and sample selection, analysis and collection tasks, respectively controlled from a mission operations centre at the conference hotel in Catania.
In the second scenario (GEO II) ESA's Interact rover monitors the sites under the supervision of a control room at ESOC (European Space Operations Centre) in Darmstadt, Germany, and is controlled from the mission control centre in Catania. The focus is on a trained astronaut interacting with operations and science teams in a control room on Earth, while a high-skilled rover is remotely controlled with a robotic arm. Shared autonomy with visual and haptic feedback is used to improve the astronaut's skills in operating the rover. In addition, the Scout rover provides the communication links required for haptic feedback from the Interact rover during teleoperation.
The third scenario (LoFar) demonstrates the installation and maintenance of a low-frequency radio antenna array using the LRU rovers and the ARDEA drone. This scenario also corresponds to a long-prevailing idea of science to install a low-frequency antenna on the far side of the moon, which should enable insights deep into space. The array used in this project consists of four functional antenna elements and incorporates a novel technique for precise positioning based on radio communication.
References and literature
Related Papers and more information:
- Mission Status and Overview Paper IAC 2022 (here)
- ESAs Analog-1 / METERON / MIRACLES / ARCHES contribution (here)
- ARCHES ICRA Paper 2020 (here)
- ARCHES Communication coverage (here)
- ARCHES Modular approach (here)
- The Rima Bode Region – Candidate for a Future Lunar Landing (here)
- DLRs robotic technology for future lunar scientific missions (here)
Please cite them!
Event details and registration
As we assume that the current Covid situation will allow many of us to attend in person, we have put together an interesting and varied programme for you, which will take place at our conference hotel Baia Verde in Catania, where the mission control rooms will also be located, as well as at our analogue campaign site Etna. (https://baiaverde.it/)
As we assume that the current Covid situation will allow many of us to attend in person, we have put together an interesting and varied programme for you, which will take place at our conference hotel Baia Verde in Catania, where the mission control rooms will also be located, as well as at our analogue campaign site Etna. (https://baiaverde.it/)
To register online for our hybrid event, click here:
https://meetanyway.com/events/arches-demomission-space
To participate in the evening programme and shuttle transports, please register your interests here:
https://terminplaner4.dfn.de/15ovUl6ZnRlkpQNt
(Please note that this is a German version of the DFN and the results are not visible to everyone for data protection reasons).
Video: Integration tests for the Demomission Space
Cooperative mapping in a heterogeneous robot team and autonomous sampling at the International Astronautical Congress (IAC) 2018 and localisation and mapping with three agents in the lunar analogue environment of the volcano Etna.Publication for the video::