Arches Project Details
Multi-Robot-Cooperation
The importance of robotics for industry and science is continuously growing. In the long term, robotic systems will even become indispensable for modern societies as omnipresent and tireless work-power resource. Especially for the Helmholtz Association mission of finding answers for the essential questions of the human society, autonomous robot networks will become a key technology.
In particular, solving tasks like monitoring and understanding the ocean environment or exploration of the solar system will strongly depend on the deployment of autonomous and networked robotic systems. They will provide the required capabilities for continuous, long-term, and large-scale data recording as well as for manipulation and direct interaction with the surroundings. Robots allow monitoring and object manipulation on a large scale in harsh and vast environments. Accordingly, a robot network will be created within this project, which acts as an enhancement of human perception and as an extended arm for human manipulation.
The aim of the consortium is to perform interdisciplinary research on such technologies across the two domains of ocean and planetary exploration. We aim to set the robotics basis for solving the upcoming social challenges according to the mission of the Helmholtz Association. One objective of ARCHES is to create a network of robotic expertise within the Helmholtz Association. It will unite the existing robotic development branches from separate domains and therefore will lead to great advancement in robotic technology within Germany and beyond.
Through ARCHES, networks of robotic systems will be developed that fulfill the requirements for robustness and reliability characteristic for the domains. The existing hardware platforms consisting of configurable carrier systems as well as modules of sensors and manipulators that are interchangeable for applications in different systems and domains will be cross-validated. That way, the goal of creating synergies within the network of expertise will be realized. Furthermore, the aim of the project is to develop approaches that allow robots to acquire, analyze, and interpret measured data in an autonomous way. Consequently, the scope of ARCHES also includes the intelligent automation and cooperation of robotic systems. Both of these aspects are essential considering the importance of standalone robots and robot teams in all regarded applications and domains.
This also requires concepts for autonomous navigation in unknown areas, interaction and manipulation inside the environment, energy management systems and self-organising communication systems which allow the communication between different robots of a network and the communication of the network with the mission control entity.
For a seamless interaction of robots and humans an interface is required that allows to coordinate the robot team almost as intuitively as one would coordinate a team of humans. This way, non-robotics experts can efficiently participate in the mission planning procedure. The ARCHES project aims to develop common solutions for the aforementioned challenges and will establish cross-domain interfaces.
Further applications in other fields like medicine, rehabilitation, logistics and urban transportation will benefit from the fundamental concepts developed in ARCHES. For example, a transport network based on autonomous robot units will be a great assistance for the ageing society, as it could maintain the self-determined life and the mobility of elderly people.
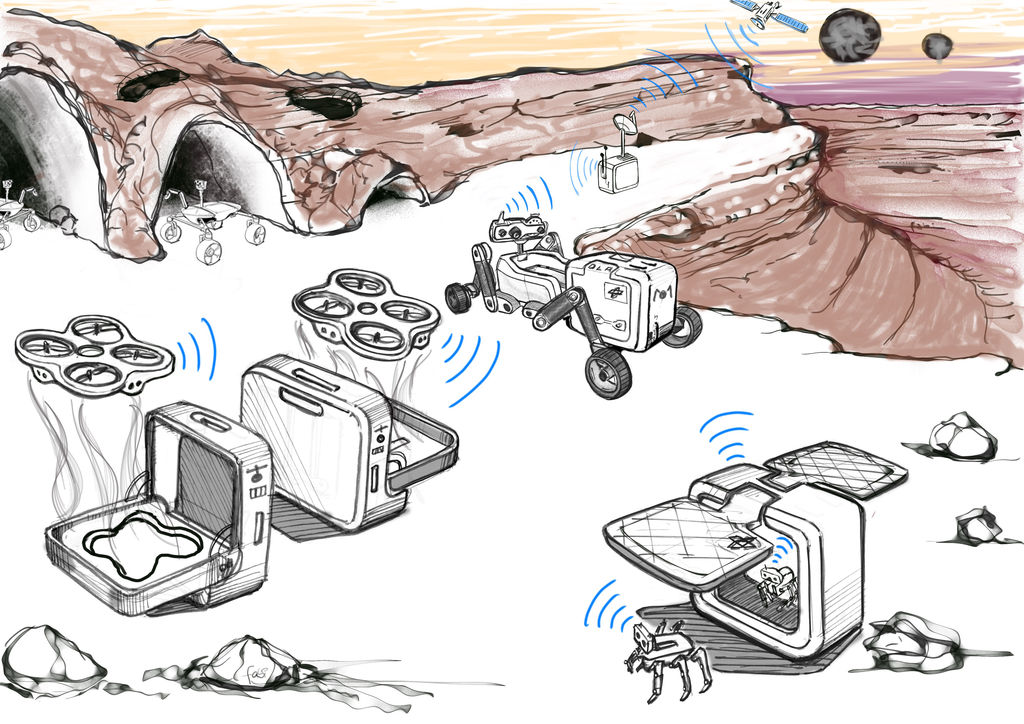
Vision images of the domains
Vision of the Space Domain
Vision of the Deepsea Domain
